
RobotCat dari Google DeepMind dapat mengendalikan banyak lengan robotik dan terus meningkat melalui data yang dihasilkannya sendiri.
RobotCat adalah AI yang mampu memperbaiki diri sendiri untuk robotika yang belajar berbagai tugas melalui beberapa lengan robotik dan secara mandiri menghasilkan data pelatihan baru untuk memperbaiki dirinya sendiri. Dalam melakukan hal tersebut, RoboCat akan mengatasi masalah utama dalam robotika: pengembangan yang lambat karena memerlukan waktu lama untuk mengumpulkan data dunia nyata yang diperlukan.
Dengan Robotic Transformer 1 dan proyek-proyek seperti PaLM-SayCan, Google juga mencoba menerapkan pengalamannya dalam bidang AI lain ke robotika. Namun, menurut Google DeepMind, RoboCat adalah AI pertama yang mampu menyelesaikan berbagai tugas dan beradaptasi dengan robot dunia nyata yang berbeda.
RobotCat Berbasis Gato dari DeepMind
RoboCat juga belajar jauh lebih cepat dari model-model lain. AI ini dapat mempelajari tugas-tugas baru dalam 100 hingga 1.000 demonstrasi, sementara model lain tidak dapat menyamai tingkat keberhasilan RobotCat, bahkan tak sampai setengahnya.
“Kemampuan ini akan membantu mempercepat penelitian robotika, karena mengurangi kebutuhan pelatihan yang diawasi oleh manusia, dan merupakan langkah penting menuju penciptaan robot serba guna,” kata tim pengembang RoboCat.
RoboCat sendiri berbasis pada Gato (Gato berarti kucing dalam bahasa Spanyol) dari DeepMind, yang dapat memproses bahasa, gambar, dan tindakan dalam lingkungan simulasi dan dunia nyata. Tim pengembang membuat beberapa penyesuaian pada Gato dan melatih model tersebut menggunakan dataset pelatihan besar berupa urutan gambar dan tindakan dari berbagai lengan robotik yang melakukan ratusan tugas.
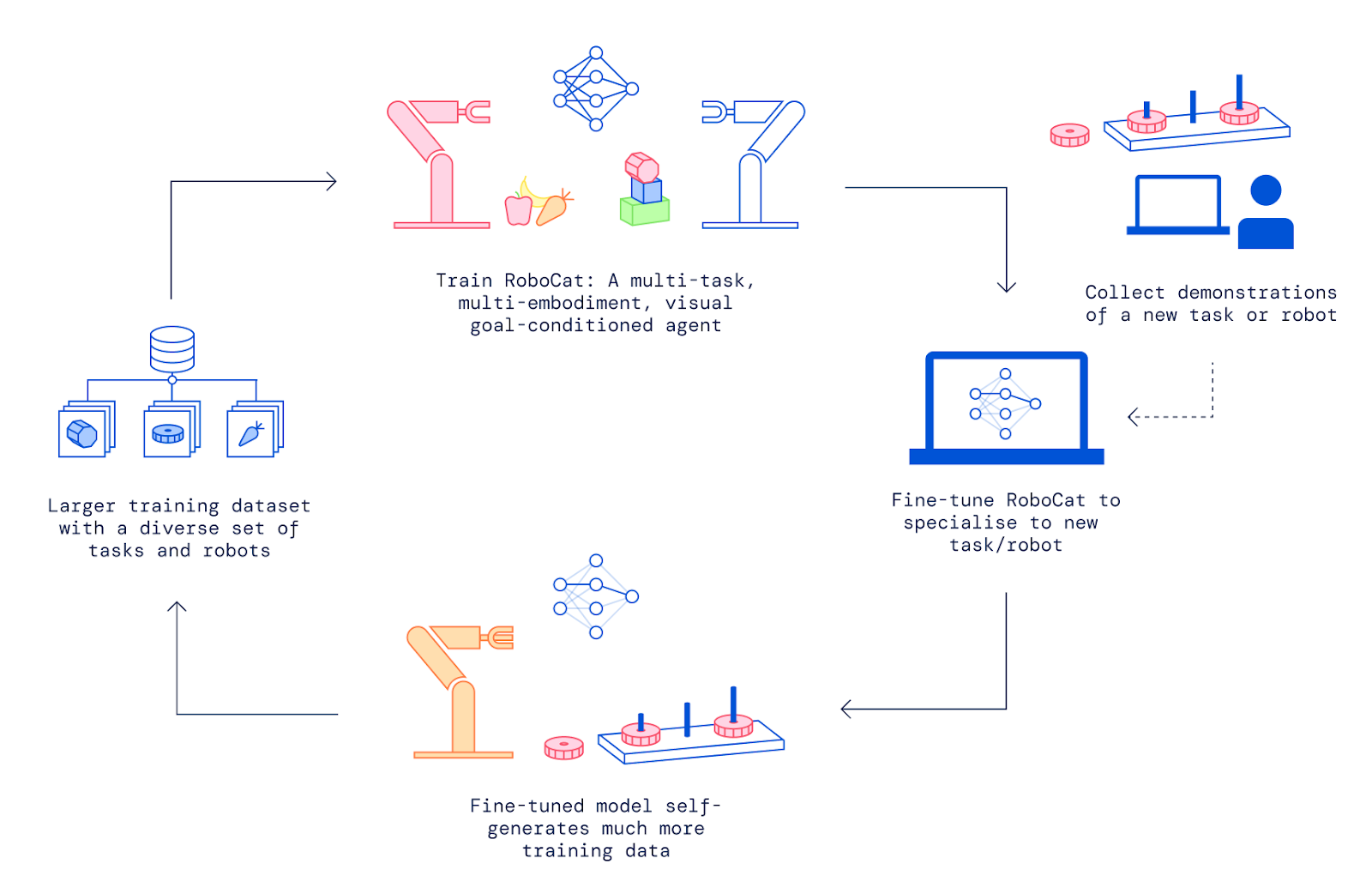
Setelah pelatihan ini, fase perbaikan diri RoboCat dimulai, di mana sistem ini belajar untuk melakukan tugas-tugas yang sebelumnya tidak diketahuinya. Pelatihan ini terjadi dalam lima tahap:
- Mengumpulkan 100 hingga 1.000 demonstrasi dari tugas atau robot baru dengan lengan robotik yang dikendalikan oleh manusia.
- Menyetel ulang RoboCat untuk tugas baru, menciptakan cabang khusus baru.
- Cabang baru yang tercipta mempraktikkan tugas baru tersebut rata-rata 10.000 kali, sehingga menghasilkan lebih banyak data pelatihan.
- Data demonstrasi dan data yang dihasilkan sendiri digabungkan menjadi dataset pelatihan RoboCat yang ada.
- Versi baru RoboCat kemudian dilatih menggunakan dataset pelatihan baru tersebut.
Kemampuan RoboCat untuk belajar secara mandiri meningkat seiring pengalaman
Dengan menggabungkan semua upaya pelatihan ini, RoboCat memiliki dataset jutaan lintasan dengan sumber dari lengan robot nyata dan simulasi, termasuk data yang dihasilkan sendiri. Berdasarkan hal ini, RoboCat dapat belajar mengendalikan lengan robot baru, bahkan dengan pegangan yang berbeda, dalam hitungan jam, dan semakin lama RoboCat belajar, semakin baik AI ini dapat mempelajari tugas-tugas berikutnya. Sebagai contoh, versi pertama RoboCat dengan 500 contoh hanya menyelesaikan tugas baru sebanyak 36 persen dari waktu yang disediakan; versi terbaru dengan tugas yang jauh lebih banyak, meningkatkan tingkat keberhasilan dua kali lipat.
“Peningkatan ini terjadi karena luas pengalaman RoboCat yang semakin bertambah, mirip dengan bagaimana orang mengembangkan berbagai keterampilan ketika mereka mendalami pembelajaran dalam suatu domain tertentu,” kata Google. “Kemampuan RoboCat untuk secara independen mempelajari keterampilan dan secara cepat memperbaiki diri, terutama ketika diterapkan pada perangkat robotik yang berbeda, akan membantu membuka jalan menuju generasi baru agen robotik serba guna yang lebih membantu.”









